En esencia, la máquina herramienta es una herramienta para que la máquina guíe la trayectoria de la herramienta, no mediante guía manual directa, como las herramientas manuales y casi todas las herramientas humanas, hasta que la gente inventó la máquina herramienta.
El control numérico (NC) se refiere al uso de lógica programable (datos en forma de letras, números, símbolos, palabras o combinaciones) para controlar automáticamente las herramientas de mecanizado. Antes de su aparición, las herramientas de procesamiento siempre estaban controladas por operadores manuales.
El control numérico por computadora (CNC) se refiere al envío de instrucciones codificadas con precisión al microprocesador en el sistema de control de la herramienta de mecanizado, para mejorar la precisión y la consistencia. El CNC del que se habla hoy en día se refiere casi en su totalidad a fresadoras conectadas a ordenadores. Técnicamente hablando, puede usarse para describir cualquier máquina controlada por una computadora.
En el siglo pasado, muchos inventos sentaron las bases para el desarrollo de máquinas herramienta CNC. Aquí, analizamos cuatro elementos básicos del desarrollo de la tecnología de control numérico: las primeras máquinas herramienta, tarjetas perforadas, servomecanismos y el lenguaje de programación de herramientas de programación automática (APT).
Las primeras máquinas herramienta
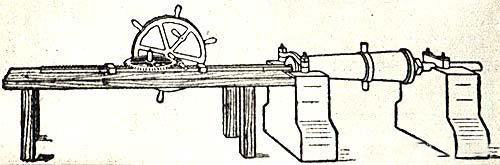
Durante la segunda revolución industrial en Gran Bretaña, James Watt fue elogiado por crear la máquina de vapor que impulsó la revolución industrial, pero encontró dificultades para fabricar la precisión de los cilindros de la máquina de vapor hasta que en 1775, John Johnwilkinson creó lo que se conoce como la primera máquina herramienta del mundo. para perforar cilindros de máquinas de vapor y se resolvió. Esta taladradora también está diseñada por Wilkinson basándose en su cañón original;
tarjeta perforada
En 1725, Basile Bouchon, un trabajador textil francés, inventó un método para controlar los telares utilizando datos codificados en cintas de papel a través de una serie de agujeros. Aunque es innovador, la desventaja de este método también es obvia: todavía necesita operadores. En 1805, Joseph Marie Jacquard adoptó este concepto, pero lo reforzó y simplificó mediante el uso de tarjetas perforadas más resistentes dispuestas en secuencia, automatizando así el proceso. Estas tarjetas perforadas se consideran ampliamente como la base de la informática moderna y marcan el fin de la industria artesanal del tejido.
Curiosamente, los tejedores de seda de esa época se resistieron a los telares de jacquard, a quienes les preocupaba que esta automatización los privara de sus trabajos y medios de vida. Quemaron repetidamente los telares puestos en producción; Sin embargo, su resistencia resultó inútil, porque la industria reconoció las ventajas de los telares automatizados. En 1812, se utilizaban en Francia 11.000 telares de jacquard.

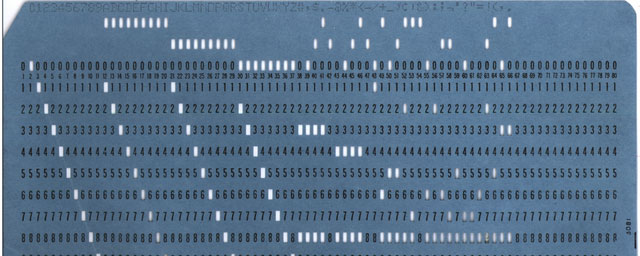
Las tarjetas perforadas se desarrollaron a finales del siglo XIX y encontraron muchos usos, desde el telégrafo hasta el piano automático. Aunque el control mecánico lo decidían las primeras cartas, el inventor estadounidense Herman Hollerith creó un tabulador de tarjetas perforadas electromecánico, que cambió las reglas del juego. Su sistema fue patentado en 1889, cuando trabajaba para la Oficina del Censo de Estados Unidos.
Herman Hollerith fundó la empresa tabuladora en 1896 y se fusionó con otras cuatro empresas para establecer IBM en 1924. En la segunda mitad del siglo XX, las tarjetas perforadas se utilizaron por primera vez para la entrada y almacenamiento de datos en computadoras y máquinas de control numérico. El formato original tiene cinco filas de agujeros, mientras que las versiones posteriores tienen seis, siete, ocho o más filas.
Mecanismo servo
El servomecanismo es un dispositivo automático que utiliza retroalimentación inductiva de errores para corregir el rendimiento de la máquina o mecanismo. En algunos casos, el servo permite controlar dispositivos de alta potencia mediante dispositivos con potencia mucho menor. El servomecanismo está compuesto por un dispositivo controlado, otro dispositivo que da órdenes, un instrumento de detección de errores, un amplificador de señal de error y un dispositivo (servomotor) que corrige errores. Los servosistemas se suelen utilizar para controlar variables como la posición y la velocidad, y los más habituales son eléctricos, neumáticos o hidráulicos.
El primer servomecanismo eléctrico fue fundado por H. Calendar en Gran Bretaña en 1896. En 1940, el MIT creó un laboratorio especial de servomecanismos, que surgió de la creciente atención del Departamento de Ingeniería Eléctrica a este tema. En el mecanizado CNC, el servosistema es muy importante para lograr la precisión de tolerancia requerida por el proceso de mecanizado automático.
Herramienta de programación automática (APT)
La herramienta de programación automática (APT) nació en el laboratorio de servomecanismos del Instituto Tecnológico de Massachusetts en 1956. Es un logro creativo del grupo de aplicaciones informáticas. Es un lenguaje de programación de alto nivel fácil de usar, que se utiliza especialmente para generar instrucciones para máquinas herramienta CNC. La versión original era anterior a FORTRAN, pero las versiones posteriores se reescribieron con Fortran.
Apt es un lenguaje creado para funcionar con la primera máquina NC del MIT, que es la primera máquina NC del mundo. Luego continuó convirtiéndose en el estándar de programación de máquinas herramienta controladas por computadora y fue ampliamente utilizado en la década de 1970. Posteriormente, el desarrollo de apt fue patrocinado por la fuerza aérea y finalmente se abrió al sector civil.
Douglas T. Ross, director del grupo de aplicaciones informáticas, es conocido como el padre de apt. Más tarde acuñó el término “diseño asistido por ordenador” (CAD).
El nacimiento del control numérico
Antes de la aparición de las máquinas herramienta CNC, el primero fue el desarrollo de las máquinas herramienta CNC y las primeras máquinas herramienta CNC. Aunque existen algunas diferencias en las diferentes descripciones de detalles históricos, la primera máquina herramienta CNC no es solo una respuesta a los desafíos de fabricación específicos que enfrenta el ejército, sino también un desarrollo natural del sistema de tarjetas perforadas.
“El control digital marca el inicio de la segunda revolución industrial y la llegada de la era científica en la que el control de las máquinas y los procesos industriales pasará de ser borradores imprecisos a ser precisos”. – Asociación de ingenieros de fabricación.
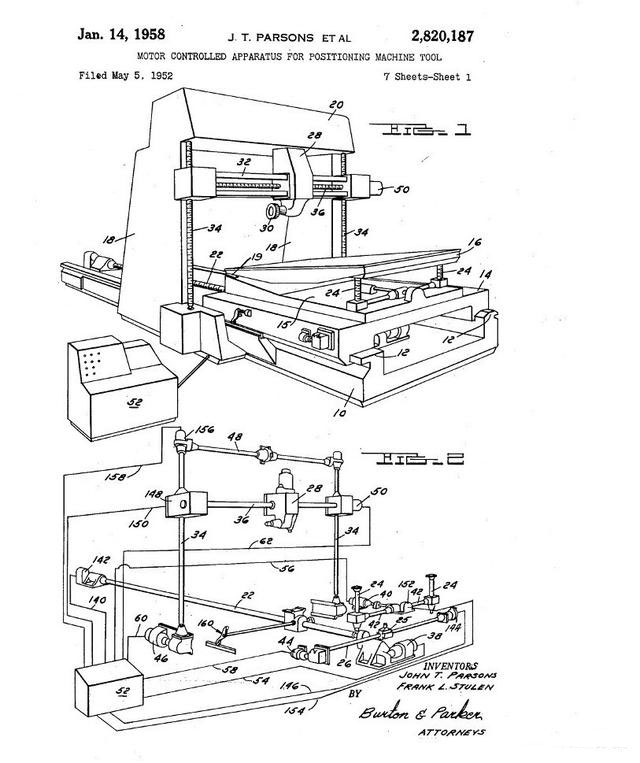
El inventor estadounidense John T. Parsons (1913 – 2007) es ampliamente considerado como el padre del control numérico. Concibió e implementó tecnología de control numérico con la ayuda del ingeniero aeronáutico Frank L. Stulen. Como hijo de un fabricante en Michigan, Parsons comenzó a trabajar como ensamblador en la fábrica de su padre a la edad de 14 años. Más tarde, fue propietario y operó varias plantas de fabricación bajo la empresa familiar Parsons Manufacturing Company.
Parsons tiene la primera patente NC y fue seleccionado en el Salón Nacional de la Fama de Inventores por su trabajo pionero en el campo del control numérico. Parsons tiene un total de 15 patentes y otras 35 están concedidas a su empresa. La sociedad de ingenieros de fabricación entrevistó a Parsons en 2001 para que todos conocieran su historia desde su perspectiva.
Horario temprano de Carolina del Norte
1942:Sikorsky Aircraft subcontrató a John T. Parsons para fabricar palas de rotor de helicópteros.
1944:debido al defecto de diseño de la viga del ala, una de las primeras 18 palas que fabricaron falló, provocando la muerte del piloto. La idea de Parsons es perforar la pala del rotor con metal para hacerla más fuerte y reemplazar el pegamento y los tornillos para sujetar el conjunto.
1946:La gente quería crear una herramienta de fabricación para producir cuchillas con precisión, lo cual era un desafío enorme y complejo para las condiciones de ese momento. Por lo tanto, Parsons contrató al ingeniero aeronáutico Frank Stulen y formó un equipo de ingeniería con otras tres personas. Stulen pensó en utilizar tarjetas perforadas de IBM para determinar el nivel de tensión en la hoja y alquilaron siete máquinas IBM para el proyecto.
En 1948, el objetivo de cambiar fácilmente la secuencia de movimiento de las máquinas herramienta automáticas se logró de dos maneras principales (en comparación con simplemente establecer una secuencia de movimiento fija) y se está llevando a cabo de dos maneras principales: control de trazador y control digital. Como podemos ver, el primero es hacer un modelo físico del objeto (o al menos un dibujo completo, como el teléfono hidroeléctrico Cincinnati Cable Tracer). El segundo no es completar la imagen del objeto o parte, sino sólo abstraerla: modelos matemáticos e instrucciones de máquina.
1949:La fuerza aérea de EE. UU. necesita la ayuda de una estructura de ala de ultra precisión. Parsons vendió su máquina CNC y ganó un contrato por valor de 200.000 dólares para hacerla realidad.
1949:Parsons y Stulen han estado trabajando con Snyder Machine & Tool Corp. para desarrollar máquinas y se dieron cuenta de que necesitaban servomotores para que las máquinas funcionaran con precisión. Parsons subcontrató el servosistema de la “fresadora Card-a-matic” al laboratorio de servomecanismo del Instituto Tecnológico de Massachusetts.
1952 (mayo): Parsons solicitó una patente para un “dispositivo de control de motor para máquinas herramienta de posicionamiento”. Concedió la patente en 1958.
1952 (agosto):En respuesta, el MIT solicitó una patente para un “servosistema de control numérico”.
Después de la Segunda Guerra Mundial, la Fuerza Aérea de EE. UU. firmó varios contratos con Parsons para desarrollar aún más la innovación del mecanizado NC realizada por su fundador John Parsons. Parsons estaba interesado en los experimentos que se llevaban a cabo en el laboratorio de servomecanismos del MIT y propuso que el MIT se convirtiera en subcontratista del proyecto en 1949 para proporcionar experiencia en control automático. En los siguientes 10 años, el MIT obtuvo el control de todo el proyecto, porque la visión del “control de trayectoria continua de tres ejes” del servolaboratorio reemplazó el concepto original de Parsons de “corte en posicionamiento de corte”. Los problemas siempre dan forma a la tecnología, pero esta historia especial registrada por el historiador David Noble se ha convertido en un hito importante en la historia de la tecnología.
1952:El MIT demostró su sistema de correa perforada de 7 rieles, que es complejo y costoso (250 tubos de vacío, 175 relés, en cinco gabinetes del tamaño de un refrigerador).
La fresadora CNC original del MIT en 1952 era Hydro Tel, una empresa de fresadoras de 3 ejes modificada de Cincinnati.
Hay siete artículos sobre "una máquina autorreguladora, que representa una revolución científica y tecnológica que moldeará efectivamente el futuro de la humanidad" en la revista "automatic control" de Scientific American en septiembre de 1952.
1955:Concord Controls (compuesto por miembros del equipo original del MIT) creó la tarjeta numérica, que reemplazó la cinta perforada en las máquinas NC del MIT con el lector de cinta desarrollado por GE.
Almacenamiento en cinta
1958:Parsons obtuvo la patente estadounidense 2820187 y vendió la licencia exclusiva a Bendix. IBM, Fujitsu y General Electric obtuvieron sublicencias después de comenzar a desarrollar sus propias máquinas.
1958:El MIT publicó un informe sobre la economía del NC, que concluía que la máquina NC actual realmente no ahorraba tiempo, sino que transfería la mano de obra del taller de la fábrica a las personas que fabricaban las correas perforadas.
Hora de publicación: 19-jul-2022